Sections of the site
Editor's Choice:
- Formula of the nth term of a geometric progression
- Electoral system in Russia
- Momentum change formula
- Presentation on the topic "Alexander Blok - the poet of the Silver Age"
- Francysk Skaryna: interesting facts
- Alexey Pleshcheev short biography Portrait of Pleshcheev for children in good quality
- Judgment. Types of judgments. Judgments in logic. What is a judgment, types of judgments
- Who killed Alexander 3. Alexander III. Tsar-Peacemaker
- What was the name of Nizhny Novgorod
- Basic concepts of probability theory classification of events
Advertising
| Momentum change formula. School Encyclopedia. Jet propulsion. Meshchersky equation. Reactive force |
body momentumThe momentum of a body is a quantity equal to the product of the mass of the body and its speed. It should be remembered that we are talking about a body that can be represented as a material point. The momentum of a body ($p$) is also called the momentum. The concept of momentum was introduced into physics by René Descartes (1596-1650). The term "impulse" appeared later (impulsus in Latin means "push"). Momentum is a vector quantity (like velocity) and is expressed by the formula: $p↖(→)=mυ↖(→)$ The direction of the momentum vector always coincides with the direction of the velocity. The unit of momentum in SI is the momentum of a body with a mass of $1$ kg moving at a speed of $1$ m/s, therefore, the unit of momentum is $1$ kg $·$ m/s. If a constant force acts on a body (material point) during the time interval $∆t$, then the acceleration will also be constant: $a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$ where, $(υ_1)↖(→)$ and $(υ_2)↖(→)$ are the initial and final velocities of the body. Substituting this value into the expression of Newton's second law, we get: $(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$ Opening the brackets and using the expression for the momentum of the body, we have: $(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$ Here $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ is the momentum change over time $∆t$. Then the previous equation becomes: $∆p↖(→)=F↖(→)∆t$ The expression $∆p↖(→)=F↖(→)∆t$ is a mathematical representation of Newton's second law. The product of a force and its duration is called momentum of force. That's why the change in the momentum of a point is equal to the change in the momentum of the force acting on it. The expression $∆p↖(→)=F↖(→)∆t$ is called body motion equation. It should be noted that the same action - a change in the momentum of a point - can be obtained by a small force in a long period of time and by a large force in a small period of time. Impulse of the system tel. Law of change of momentumThe impulse (momentum) of a mechanical system is a vector equal to the sum of the impulses of all material points of this system: $(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$ The laws of change and conservation of momentum are a consequence of Newton's second and third laws. Consider a system consisting of two bodies. The forces ($F_(12)$ and $F_(21)$ in the figure, with which the bodies of the system interact with each other, are called internal. Let, in addition to internal forces, external forces $(F_1)↖(→)$ and $(F_2)↖(→)$ act on the system. For each body, the equation $∆p↖(→)=F↖(→)∆t$ can be written. Adding the left and right parts of these equations, we get: $(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$ According to Newton's third law $(F_(12))↖(→)=-(F_(21))↖(→)$. Hence, $(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ On the left side is the geometric sum of the changes in the momentum of all the bodies of the system, equal to the change in the momentum of the system itself - $(∆p_(syst))↖(→)$. With this in mind, the equality $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ can be written: $(∆p_(sys))↖(→)=F↖(→)∆t$ where $F↖(→)$ is the sum of all external forces acting on the body. The result obtained means that only external forces can change the momentum of the system, and the change in the momentum of the system is directed in the same way as the total external force. This is the essence of the law of change in the momentum of a mechanical system. Internal forces cannot change the total momentum of the system. They only change the impulses of the individual bodies of the system. Law of conservation of momentumFrom the equation $(∆p_(syst))↖(→)=F↖(→)∆t$ the momentum conservation law follows. If no external forces act on the system, then the right side of the equation $(∆p_(sys))↖(→)=F↖(→)∆t$ vanishes, which means that the total momentum of the system remains unchanged: $(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$ A system on which no external forces act or the resultant of external forces is equal to zero is called closed. The law of conservation of momentum states: The total momentum of a closed system of bodies remains constant for any interaction of the bodies of the system with each other. The result obtained is valid for a system containing an arbitrary number of bodies. If the sum of external forces is not equal to zero, but the sum of their projections on some direction is equal to zero, then the projection of the momentum of the system on this direction does not change. So, for example, a system of bodies on the surface of the Earth cannot be considered closed due to the force of gravity acting on all bodies, however, the sum of the projections of impulses on the horizontal direction can remain unchanged (in the absence of friction), since in this direction the force of gravity does not is valid. Jet propulsionConsider examples that confirm the validity of the law of conservation of momentum. Let's take a children's rubber balloon, inflate it and let it go. We will see that when the air starts to come out of it in one direction, the balloon itself will fly in the other direction. The movement of the ball is an example of jet propulsion. It is explained by the law of conservation of momentum: the total momentum of the system "ball plus air in it" before the outflow of air is zero; it must remain equal to zero during the movement; therefore, the ball moves in the direction opposite to the direction of the outflow of the jet, and with such a speed that its momentum is equal in absolute value to the momentum of the air jet. jet propulsion called the motion of a body that occurs when a part of it separates from it at some speed. Due to the law of conservation of momentum, the direction of motion of the body is opposite to the direction of motion of the separated part. Rocket flights are based on the principle of jet propulsion. A modern space rocket is a very complex aircraft. The mass of the rocket is the sum of the mass of the working fluid (i.e., hot gases resulting from the combustion of fuel and ejected in the form of a jet stream) and the final, or, as they say, “dry” mass of the rocket, remaining after the ejection of the working fluid from the rocket. When a reactive gas jet is ejected from a rocket at high speed, the rocket itself rushes in the opposite direction. According to the momentum conservation law, the momentum $m_(p)υ_p$ acquired by the rocket must be equal to the momentum $m_(gas) υ_(gas)$ of the ejected gases: $m_(p)υ_p=m_(gas) υ_(gas)$ It follows that the speed of the rocket $υ_p=((m_(gas))/(m_p)) υ_(gas)$ It can be seen from this formula that the greater the speed of the rocket, the greater the speed of the ejected gases and the ratio of the mass of the working fluid (i.e., the mass of fuel) to the final ("dry") mass of the rocket. The formula $υ_p=((m_(gas))/(m_p))·υ_(gas)$ is approximate. It does not take into account that as the fuel burns, the mass of the flying rocket becomes smaller and smaller. The exact formula for the speed of a rocket was obtained in 1897 by K. E. Tsiolkovsky and bears his name. Force workThe term "work" was introduced into physics in 1826 by the French scientist J. Poncelet. If in everyday life only human labor is called work, then in physics and, in particular, in mechanics, it is generally accepted that work is done by force. The physical quantity of work is usually denoted by the letter $A$. Force work- this is a measure of the action of a force, depending on its module and direction, as well as on the displacement of the point of application of the force. For a constant force and rectilinear movement, the work is determined by the equality: $A=F|∆r↖(→)|cosα$ where $F$ is the force acting on the body, $∆r↖(→)$ is the displacement, $α$ is the angle between the force and the displacement.
The work of the force is equal to the product of the modules of force and displacement and the cosine of the angle between them, i.e. the scalar product of the vectors $F↖(→)$ and $∆r↖(→)$. Work is a scalar quantity. If $α 0$, and if $90° When several forces act on a body, the total work (the sum of the work of all forces) is equal to the work of the resulting force. The SI unit of work is joule($1$ J). $1$ J is the work done by a force of $1$ N on a path of $1$ m in the direction of this force. This unit is named after the English scientist J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojoules and millijoules are also often used: $1$ kJ $= 1,000$ J, $1$ mJ $= 0.001$ J. The work of gravityLet us consider a body sliding along an inclined plane with an inclination angle $α$ and a height $H$.
We express $∆x$ in terms of $H$ and $α$: $∆x=(H)/(sinα)$ Considering that gravity $F_т=mg$ makes an angle ($90° - α$) with the direction of movement, using the formula $∆x=(H)/(sin)α$, we obtain an expression for the work of gravity $A_g$: $A_g=mg cos(90°-α)(H)/(sinα)=mgH$ From this formula it can be seen that the work of gravity depends on the height and does not depend on the angle of inclination of the plane. From this it follows that:
The work of reaction forces, is zero because the reaction force ($N$) is directed perpendicular to the displacement $∆x$. The work of the friction forceThe friction force is directed opposite to the displacement $∆x$ and makes an angle $180°$ with it, so the work of the friction force is negative: $A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$ Since $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ then $A_(tr)=μmgHctgα$ The work of the elastic forceLet an external force $F↖(→)$ act on an unstretched spring of length $l_0$, stretching it by $∆l_0=x_0$. In position $x=x_0F_(control)=kx_0$. After the termination of the force $F↖(→)$ at the point $x_0$, the spring is compressed under the action of the force $F_(control)$.
Let us determine the work of the elastic force when the coordinate of the right end of the spring changes from $х_0$ to $х$. Since the elastic force in this area changes linearly, in Hooke's law, its average value in this area can be used: $F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$ Then the work (taking into account the fact that the directions $(F_(exp.av.))↖(→)$ and $(∆x)↖(→)$ coincide) is equal to: $A_(exerc)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$ It can be shown that the form of the last formula does not depend on the angle between $(F_(exp.av.))↖(→)$ and $(∆x)↖(→)$. The work of the elastic forces depends only on the deformations of the spring in the initial and final states. Thus, the elastic force, like gravity, is a conservative force. Power of forcePower is a physical quantity measured by the ratio of work to the period of time during which it is produced. In other words, power shows how much work is done per unit of time (in SI, for $1$ s). Power is determined by the formula: where $N$ is the power, $A$ is the work done in the time $∆t$. Substituting $A=F|(∆r)↖(→)|cosα$ into the formula $N=(A)/(∆t)$ instead of the work $A$, we get: $N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$ The power is equal to the product of the modules of the force and velocity vectors and the cosine of the angle between these vectors. Power in the SI system is measured in watts (W). One watt ($1$ W) is the power at which $1$ J of work is done in $1$ s: $1$ W $= 1$ J/s. This unit is named after the English inventor J. Watt (Watt), who built the first steam engine. J. Watt himself (1736-1819) used a different unit of power - horsepower (hp), which he introduced in order to be able to compare the performance of a steam engine and a horse: $ 1 $ hp. $= 735.5$ Tue. In technology, larger units of power are often used - kilowatts and megawatts: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W. Kinetic energy. Law of change of kinetic energyIf a body or several interacting bodies (a system of bodies) can do work, then they say that they have energy. The word "energy" (from the Greek. energia - action, activity) is often used in everyday life. So, for example, people who can quickly do work are called energetic, with great energy. The energy possessed by a body due to motion is called kinetic energy. As in the case of the definition of energy in general, we can say about kinetic energy that kinetic energy is the ability of a moving body to do work. Let us find the kinetic energy of a body of mass $m$ moving with a speed of $υ$. Since kinetic energy is the energy due to motion, the zero state for it is the state in which the body is at rest. Having found the work necessary to communicate a given speed to the body, we will find its kinetic energy. To do this, we calculate the work done on the displacement section $∆r↖(→)$ when the directions of the force vectors $F↖(→)$ and displacement $∆r↖(→)$ coincide. In this case, the work is where $∆x=∆r$
For the movement of a point with acceleration $α=const$, the expression for movement has the form: $∆x=υ_1t+(at^2)/(2),$ where $υ_1$ is the initial speed. Substituting the expression for $∆x$ from $∆x=υ_1t+(at^2)/(2)$ into the equation $A=F ∆x$ and using Newton's second law $F=ma$, we get: $A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$ Expressing the acceleration in terms of initial $υ_1$ and final $υ_2$ speeds $a=(υ_2-υ_1)/(t)$ and substituting into $A=ma(υ_1t+(at^2)/(2))=(mat)/ (2)(2υ_1+at)$ we have: $A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$ $A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$ Now equating the initial velocity to zero: $υ_1=0$, we obtain an expression for kinetic energy: $E_K=(mυ)/(2)=(p^2)/(2m)$ Thus, a moving body has kinetic energy. This energy is equal to the work that must be done to increase the speed of the body from zero to $υ$. From $E_K=(mυ)/(2)=(p^2)/(2m)$ it follows that the work of a force to move a body from one position to another is equal to the change in kinetic energy: $A=E_(K_2)-E_(K_1)=∆E_K$ The equality $A=E_(K_2)-E_(K_1)=∆E_K$ expresses theorem on the change in kinetic energy. Change in the kinetic energy of the body(material point) for a certain period of time is equal to the work done during this time by the force acting on the body. Potential energyPotential energy is the energy determined by the mutual arrangement of interacting bodies or parts of the same body. Since energy is defined as the ability of a body to do work, potential energy is naturally defined as the work of a force that depends only on the relative position of the bodies. This is the work of gravity $A=mgh_1-mgh_2=mgH$ and the work of elasticity: $A=(kx_0^2)/(2)-(kx^2)/(2)$ The potential energy of the body interacting with the Earth is called the value equal to the product of the mass $m$ of this body and the free fall acceleration $g$ and the height $h$ of the body above the Earth's surface: The potential energy of an elastically deformed body is the value equal to half the product of the coefficient of elasticity (stiffness) $k$ of the body and the square of deformation $∆l$: $E_p=(1)/(2)k∆l^2$ The work of conservative forces (gravity and elasticity), taking into account $E_p=mgh$ and $E_p=(1)/(2)k∆l^2$, is expressed as follows: $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ This formula allows us to give a general definition of potential energy. The potential energy of a system is a value that depends on the position of the bodies, the change of which during the transition of the system from the initial state to the final state is equal to the work of the internal conservative forces of the system, taken with the opposite sign. The minus sign on the right side of the equation $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ means that when work is done by internal forces (for example, falling body to the ground under the action of gravity in the "stone-Earth" system), the energy of the system decreases. Work and change in potential energy in a system always have opposite signs. Since work determines only the change in potential energy, only the change in energy has physical meaning in mechanics. Therefore, the choice of the zero energy level is arbitrary and is determined solely by considerations of convenience, for example, the ease of writing the corresponding equations. The law of change and conservation of mechanical energyTotal mechanical energy of the system the sum of its kinetic and potential energies is called: It is determined by the position of the bodies (potential energy) and their speed (kinetic energy). According to the kinetic energy theorem, $E_k-E_(k_1)=A_p+A_(pr),$ where $А_р$ is the work of potential forces, $А_(pr)$ is the work of nonpotential forces. In turn, the work of potential forces is equal to the difference in the potential energy of the body in the initial $E_(p_1)$ and final $E_p$ states. With this in mind, we get an expression for the law of change of mechanical energy: $(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$ where the left side of the equality is the change in the total mechanical energy, and the right side is the work of nonpotential forces. So, law of change of mechanical energy reads: The change in the mechanical energy of the system is equal to the work of all nonpotential forces. A mechanical system in which only potential forces act is called conservative. In a conservative system $A_(pr) = 0$. this implies law of conservation of mechanical energy: In a closed conservative system, the total mechanical energy is conserved (does not change with time): $E_k+E_p=E_(k_1)+E_(p_1)$ The law of conservation of mechanical energy is derived from the laws of Newtonian mechanics, which are applicable to a system of material points (or macroparticles). However, the law of conservation of mechanical energy is also valid for a system of microparticles, where Newton's laws themselves no longer apply. The law of conservation of mechanical energy is a consequence of the homogeneity of time. Uniformity of time is that, under the same initial conditions, the course of physical processes does not depend on the moment at which these conditions are created. The law of conservation of total mechanical energy means that when the kinetic energy in a conservative system changes, its potential energy must also change, so that their sum remains constant. This means the possibility of converting one type of energy into another. In accordance with various forms of the motion of matter, various types of energy are considered: mechanical, internal (equal to the sum of the kinetic energy of the chaotic movement of molecules relative to the center of mass of the body and the potential energy of the interaction of molecules with each other), electromagnetic, chemical (which consists of the kinetic energy of the movement of electrons and electric the energy of their interaction with each other and with atomic nuclei), nuclear energy, etc. It can be seen from the foregoing that the division of energy into different types is rather arbitrary. Natural phenomena are usually accompanied by the transformation of one type of energy into another. So, for example, the friction of parts of various mechanisms leads to the conversion of mechanical energy into heat, i.e., into internal energy. In heat engines, on the contrary, internal energy is converted into mechanical energy; in galvanic cells, chemical energy is converted into electrical energy, etc. Currently, the concept of energy is one of the basic concepts of physics. This concept is inextricably linked with the idea of the transformation of one form of movement into another. Here is how the concept of energy is formulated in modern physics: Energy is a general quantitative measure of the movement and interaction of all types of matter. Energy does not arise from nothing and does not disappear, it can only pass from one form to another. The concept of energy binds together all the phenomena of nature. simple mechanisms. mechanism efficiencySimple mechanisms are devices that change the magnitude or direction of the forces applied to the body. They are used to move or lift large loads with little effort. These include the lever and its varieties - blocks (movable and fixed), a gate, an inclined plane and its varieties - a wedge, a screw, etc. Lever arm. Lever ruleThe lever is a rigid body capable of rotating around a fixed support.
The leverage rule says: A lever is in equilibrium if the forces applied to it are inversely proportional to their arms: $(F_2)/(F_1)=(l_1)/(l_2)$ From the formula $(F_2)/(F_1)=(l_1)/(l_2)$, applying the property of proportion to it (the product of the extreme terms of the proportion is equal to the product of its middle terms), we can obtain the following formula: But $F_1l_1=M_1$ is the moment of force tending to turn the lever clockwise, and $F_2l_2=M_2$ is the moment of force tending to turn the lever counterclockwise. Thus, $M_1=M_2$, which was to be proved. The lever began to be used by people in ancient times. With its help, it was possible to lift heavy stone slabs during the construction of the pyramids in ancient Egypt. Without leverage, this would not have been possible. Indeed, for example, for the construction of the pyramid of Cheops, which has a height of $147$ m, more than two million stone blocks were used, the smallest of which had a mass of $2.5$ tons! Nowadays, levers are widely used both in production (for example, cranes) and in everyday life (scissors, wire cutters, scales). Fixed blockThe action of a fixed block is similar to the action of a lever with equal leverage: $l_1=l_2=r$. The applied force $F_1$ is equal to the load $F_2$, and the equilibrium condition is: Fixed block used when you need to change the direction of a force without changing its magnitude. Movable blockThe movable block acts similarly to a lever, whose arms are: $l_2=(l_1)/(2)=r$. In this case, the equilibrium condition has the form: where $F_1$ is the applied force, $F_2$ is the load. The use of a movable block gives a gain in strength twice. Polyspast (block system)
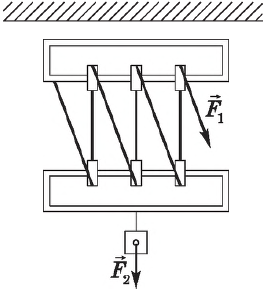
An ordinary chain hoist consists of $n$ movable and $n$ fixed blocks. Applying it gives a gain in strength of $2n$ times: $F_1=(F_2)/(2n)$ Power chain hoist consists of n movable and one fixed block. The use of a power chain hoist gives a gain in strength of $2^n$ times: $F_1=(F_2)/(2^n)$
ScrewThe screw is an inclined plane wound on the axis.
The condition for the balance of forces acting on the screw has the form: $F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$
where $F_1$ is an external force applied to the screw and acting at a distance $R$ from its axis; $F_2$ is the force acting in the direction of the screw axis; $h$ - screw pitch; $r$ is the average thread radius; $α$ is the angle of the thread. $R$ is the length of the lever (wrench) that rotates the screw with the force $F_1$. EfficiencyCoefficient of performance (COP) - the ratio of useful work to all the work expended. Efficiency is often expressed as a percentage and denoted by the Greek letter $η$ ("this"): $η=(A_p)/(A_3) 100%$ where $A_n$ is useful work, $A_3$ is all the work expended. Useful work is always only a part of the total work that a person expends using this or that mechanism. Part of the work done is spent on overcoming the forces of friction. Since $А_3 > А_п$, the efficiency is always less than $1$ (or $< 100%$). Since each of the works in this equation can be expressed as the product of the corresponding force and the distance traveled, it can be rewritten as follows: $F_1s_1≈F_2s_2$. From this it follows that, winning with the help of the mechanism in force, we lose the same number of times on the way, and vice versa. This law is called the golden rule of mechanics. The golden rule of mechanics is an approximate law, since it does not take into account the work to overcome friction and gravity of the parts of the devices used. Nevertheless, it can be very useful when analyzing the operation of any simple mechanism.
So, for example, thanks to this rule, we can immediately say that the worker shown in the figure, with a double gain in the lifting force of $ 10 $ cm, will have to lower the opposite end of the lever by $ 20 $ cm. Collision of bodies. Elastic and inelastic impactsThe laws of conservation of momentum and mechanical energy are used to solve the problem of the motion of bodies after a collision: the known momenta and energies before the collision are used to determine the values of these quantities after the collision. Consider the cases of elastic and inelastic impacts. An absolutely inelastic impact is called, after which the bodies form a single body moving at a certain speed. The problem of the speed of the latter is solved using the law of conservation of momentum for a system of bodies with masses $m_1$ and $m_2$ (if we are talking about two bodies) before and after the impact: $m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$ Obviously, the kinetic energy of bodies is not conserved during an inelastic impact (for example, at $(υ_1)↖(→)=-(υ_2)↖(→)$ and $m_1=m_2$ it becomes equal to zero after the impact). An absolutely elastic impact is called, in which not only the sum of impulses is preserved, but also the sum of the kinetic energies of the colliding bodies. For an absolutely elastic impact, the equations $m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$ $(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2 )^2)/(2)$ where $m_1, m_2$ are the masses of the balls, $υ_1, υ_2$ are the velocities of the balls before the impact, $υ"_1, υ"_2$ are the velocities of the balls after the impact. 3.2. Pulse 3.2.2. Change in body momentum To apply the laws of change and conservation of momentum, it is necessary to be able to calculate the change in momentum. Change of momentumΔ P → body is determined by the formula ∆ P → = P → 2 − P → 1 , where P → 1 = m v → 1 is the initial momentum of the body; P → 2 = m v → 2 - its final momentum; m - body weight; v → 1 - initial speed of the body; v → 2 is its final speed. To calculate the change in body momentum, it is advisable to use the following algorithm: 1) choose a coordinate system and find the projections of the initial P → 1 and final P → 2 momenta of the body onto the coordinate axes: P 1 x , P 2 x ; P 1 y , P 2 y ; ∆P x = P 2 x − P 1 x ; ∆P y = P 2 y − P 1 y ; 3) calculate the modulus of the momentum change vector Δ P → as ΔP = ΔP x 2 + ΔP y 2 . Example 4. A body falls at an angle of 30° to the vertical onto a horizontal plane. Determine the modulus of change in the momentum of the body during the impact, if at the moment of contact with the plane the modulus of the body's momentum is 15 kg m/s. The impact of a body on a plane is assumed to be absolutely elastic. Solution. A body falling on a horizontal surface at some angle α to the vertical and colliding with this surface is absolutely elastic,
P 1 \u003d P 2 \u003d P;
α 1 = α 2 = α, where P 1 \u003d mv 1 - the modulus of the momentum of the body before the impact; P 2 \u003d mv 2 - the modulus of the momentum of the body after the impact; m - body weight; v 1 - the value of the speed of the body before the impact; v 2 - the value of the speed of the body after the impact; α 1 - angle of incidence; α 2 - angle of reflection. Specified body impulses, angles and coordinate system are shown in the figure. To calculate the modulus of change in the momentum of the body, we use the algorithm: 1) we write the projections of the impulses before and after the impact of the body on the surface onto the coordinate axes: P 1 x = mv sin α, P 2 x = mv sin α; P 1 y = −mv cos α, P 2 y = mv cos α; 2) find the projections of the momentum change on the coordinate axes using the formulas Δ P x \u003d P 2 x - P 1 x \u003d m v sin α - m v sin α \u003d 0; Δ P y = P 2 y − P 1 y = m v cos α − (− m v cos α) = 2 m v cos α ; Δ P = (Δ P x) 2 + (Δ P y) 2 = (Δ P y) 2 = | ∆P y | = 2 m v cos α . The value P = mv is specified in the condition of the problem; therefore, we will calculate the modulus of change in momentum by the formula Δ P = 2 P cos 30 ° = 2 ⋅ 15 ⋅ 0.5 3 ≈ 26 kg ⋅ m/s. Example 5. A stone of mass 50 g is thrown at an angle of 45° to the horizon with a speed of 20 m/s. Find the modulus of change in the momentum of the stone during the flight. Ignore air resistance. Solution. If there is no air resistance, then the body moves along a symmetrical parabola; wherein
v 0 = v , where v 0 - the value of the speed of the body at the point of throw; v is the velocity of the body at the point of fall; α is the angle that the velocity vector makes with the horizon at the point of throwing the body; β is the angle that the velocity vector makes with the horizon at the point of the body's fall. Body velocity vectors (momentum vectors) and angles are shown in the figure.
To calculate the modulus of change in the momentum of the body during the flight, we use the algorithm: 1) write the projections of impulses for the point of throw and for the point of fall onto the coordinate axes: P 1 x = mv 0 cos α, P 2 x = mv 0 cos α; P 1 y = mv 0 sin α, P 2 y = −mv 0 sin α; 2) find the projections of the momentum change on the coordinate axes using the formulas Δ P x \u003d P 2 x - P 1 x \u003d m v 0 cos α - m v 0 cos α \u003d 0; Δ P y \u003d P 2 y - P 1 y \u003d - m v 0 sin α - m v 0 sin α \u003d - 2 m v 0 sin α; 3) calculate the momentum modulus as Δ P = (Δ P x) 2 + (Δ P y) 2 = (Δ P y) 2 = | ∆P y | \u003d 2 m v 0 sin α, where m - body weight; v 0 - the module of the initial velocity of the body. Therefore, we will calculate the modulus of change in momentum by the formula Δ P = 2 m v 0 sin 45 ° = 2 ⋅ 50 ⋅ 10 − 3 ⋅ 20 ⋅ 0.5 2 ≈ 1.4 kg ⋅ m/s. Newton's laws make it possible to solve various practically important problems concerning the interaction and motion of bodies. A large number of such problems are connected, for example, with finding the acceleration of a moving body if all the forces acting on this body are known. And then other quantities are determined by acceleration (instantaneous speed, displacement, etc.). But it is often very difficult to determine the forces acting on the body. Therefore, to solve many problems, another important physical quantity is used - the momentum of the body.
Momentum is a vector quantity. The direction of the momentum vector of the body always coincides with the direction of the velocity vector. The unit of momentum in SI is the momentum of a body with a mass of 1 kg moving at a speed of 1 m/s. This means that the unit of momentum of a body in SI is 1 kg m/s. When calculating, they use the equation for projections of vectors: p x \u003d mv x. Depending on the direction of the velocity vector with respect to the selected X-axis, the projection of the momentum vector can be either positive or negative. The word "impulse" (impulsus) in Latin means "push". Some books use the term momentum instead of momentum. This quantity was introduced into science at about the same period of time when Newton discovered the laws that were later named after him (that is, at the end of the 17th century). When bodies interact, their momenta can change. This can be verified by a simple experiment. Two balls of the same mass are hung on thread loops to a wooden ruler fixed on a tripod ring, as shown in Figure 44, a. Rice. 44. Demonstration of the Law of Conservation of Momentum Ball 2 is deflected from the vertical by an angle a (Fig. 44, b) and released. Returning to the previous position, he hits the ball 1 and stops. In this case, the ball 1 comes into motion and deviates by the same angle a (Fig. 44, c). In this case, it is obvious that as a result of the interaction of the balls, the momentum of each of them has changed: by how much the momentum of ball 2 decreased, by the same amount the momentum of ball 1 increased. If two or more bodies interact only with each other (that is, they are not exposed to external forces), then these bodies form a closed system. The momentum of each of the bodies included in a closed system can change as a result of their interaction with each other. But
This is the law of conservation of momentum. The law of conservation of momentum is also fulfilled if external forces act on the bodies of the system, the vector sum of which is equal to zero. Let us show this by using Newton's second and third laws to derive the law of conservation of momentum. For simplicity, consider a system consisting of only two bodies - balls with masses m 1 and m 2, which move rectilinearly towards each other with velocities v 1 and v 2 (Fig. 45).
Rice. 45. A system of two bodies - balls moving in a straight line towards each other The forces of gravity acting on each of the balls are balanced by the elastic forces of the surface on which they roll. Hence, the effect of these forces can be ignored. The forces of resistance to movement in this case are small, so we will not take into account their influence either. Thus, we can assume that the balls interact only with each other. Figure 45 shows that after some time the balls will collide. During a collision lasting for a very short time t, interaction forces F 1 and F 2 will appear, applied respectively to the first and second balls. As a result of the action of forces, the speeds of the balls will change. Let's designate speeds of balls after collision by letters v 1 and v 2 . In accordance with Newton's third law, the interaction forces of the balls are equal in absolute value and directed in opposite directions: According to Newton's second law, each of these forces can be replaced by the product of mass and acceleration received by each of the balls during the interaction: m 1 a 1 \u003d -m 2 a 2. Accelerations, as you know, are determined from the equalities:
Replacing the corresponding expressions in the equation for acceleration forces, we obtain:
As a result of reducing both parts of the equality by t, we get: m1 (v "1 - v 1) \u003d -m 2 (v" 2 - v 2). We group the terms of this equation as follows: m 1 v 1 "+ m 2 v 2" = m 1 v 1 = m 2 v 2. (1) Considering that mv = p, we write equation (1) in the following form: P "1 + P" 2 \u003d P 1 + P 2. (2) The left parts of equations (1) and (2) are the total momentum of the balls after their interaction, and the right parts are the total momentum before the interaction. This means that, despite the fact that the momentum of each of the balls changed during the interaction, the vector sum of their momenta after the interaction remained the same as before the interaction. Equations (1) and (2) are the mathematical record of the momentum conservation law. Since this course considers only the interactions of bodies moving along one straight line, then to write the law of conservation of momentum in scalar form, one equation is sufficient, which includes the projections of vector quantities on the X axis: m 1 v "1x + m 2 v" 2x \u003d m 1 v 1x + m 2 v 2x. Questions
Exercise 20
Often in physics they talk about the momentum of a body, implying the amount of motion. In fact, this concept is closely connected with a completely different quantity - with force. The impulse of force - what is it, how is it introduced into physics, and what is its meaning: all these issues are covered in detail in the article. Number of movementThe impulse of the body and the impulse of the force are two interrelated quantities, moreover, they practically mean the same thing. First, let's look at the concept of momentum. The amount of motion as a physical quantity first appeared in the scientific works of modern scientists, in particular in the 17th century. It is important to note two figures here: Galileo Galilei, the famous Italian, who called the quantity under discussion impeto (impulse), and Isaac Newton, the great Englishman, who, in addition to the magnitude of motus (movement), also used the concept of vis motrix (driving force). So, the above-named scientists understood the product of the mass of an object and the speed of its linear movement in space as the amount of motion. This definition in the language of mathematics is written as follows: Note that we are talking about the vector value (p¯), directed in the direction of body movement, which is proportional to the speed modulus, and the body mass plays the role of the proportionality coefficient. Relation between the momentum of force and the change in p¯As mentioned above, in addition to the momentum, Newton also introduced the concept of driving force. He defined this as follows: This is the familiar law of the appearance of acceleration a¯ on a body as a result of some external force F¯ acting on it. This important formula allows us to derive the law of momentum of force. Note that a¯ is the time derivative of the rate (the rate of change of v¯), which means:
The first formula in the second line is the impulse of the force, that is, the value equal to the product of the force and the time interval during which it acts on the body. It is measured in newtons per second. Formula AnalysisThe expression for the impulse of force in the previous paragraph also reveals the physical meaning of this quantity: it shows how much the amount of motion changes over a period of time dt. Note that this change (dp¯) is completely independent of the total momentum of the body. The impulse of force is the cause of a change in the momentum, which can lead to both an increase in the latter (when the angle between the force F¯ and the speed v¯ is less than 90 o) and its decrease (the angle between F¯ and v¯ is greater than 90 o).
An important conclusion follows from the analysis of the formula: the units of measurement of the impulse of force are the same as those for p¯ (newton per second and kilogram per meter per second), moreover, the first value is equal to the change in the second, therefore, instead of the impulse of force, the phrase "body impulse" is often used, although it is more correct to say "change in momentum". Forces that depend and do not depend on timeAbove, the law of force impulse was presented in differential form. To calculate the value of this quantity, it is necessary to carry out integration over the action time. Then we get the formula:
Here, the force F¯(t) acts on the body during the time Δt = t2-t1, which leads to a change in the momentum by Δp¯. As you can see, the impulse of a force is a quantity determined by a force that depends on time. Now let's consider a simpler situation, which is realized in a number of experimental cases: we assume that the force does not depend on time, then we can easily take the integral and obtain a simple formula:
When solving real problems on changing the momentum, despite the fact that the force generally depends on the time of action, it is assumed to be constant and some effective average value F¯ is calculated. Examples of manifestation in practice of an impulse of force
What role this value plays is easiest to understand with specific examples from practice. Before we give them, we write out the corresponding formula once again: Note that if Δp¯ is a constant value, then the momentum modulus of the force is also a constant, so the larger Δt, the smaller F¯, and vice versa. Now let's give concrete examples of the momentum of force in action:
The concept of the moment of force and its momentumAnd the impulse of this moment is other quantities different from those considered above, since they no longer relate to linear, but to rotational motion. So, the moment of force M¯ is defined as the vector product of the shoulder (the distance from the axis of rotation to the point of action of the force) and the force itself, that is, the formula is valid: The moment of force reflects the ability of the latter to perform torsion of the system around the axis. For example, if you hold the wrench away from the nut (large lever d¯), you can create a large moment M¯, which will allow you to unscrew the nut.
By analogy with the linear case, the momentum M¯ can be obtained by multiplying it by the time interval during which it acts on a rotating system, that is: The quantity ΔL¯ is called the change in angular momentum, or angular momentum. The last equation is important for considering systems with an axis of rotation, because it shows that the angular momentum of the system will be conserved if there are no external forces that create the moment M¯, which is written mathematically as follows:
Thus, both momentum equations (for linear and circular motion) turn out to be similar in terms of their physical meaning and mathematical consequences. Bird and Airplane Collision ChallengeThis problem is not something fantastic. Such collisions do occur quite often. Thus, according to some data, in 1972, about 2.5 thousand bird collisions with combat and transport aircraft, as well as with helicopters, were recorded in Israeli airspace (the zone of the densest bird migration). The task is as follows: it is necessary to approximately calculate what impact force falls on a bird if an airplane flying at a speed of v = 800 km / h is encountered on its path. Before proceeding to the solution, let's assume that the length of the bird in flight is l = 0.5 meters, and its mass is m = 4 kg (it can be, for example, a drake or a goose). We will neglect the speed of the bird (it is small compared to that of the aircraft), and we will also consider the mass of the aircraft to be much greater than that of the birds. These approximations allow us to say that the change in the momentum of the bird is equal to: To calculate the impact force F, you need to know the duration of this incident, it is approximately equal to: Combining these two formulas, we get the desired expression:
Substituting the numbers from the condition of the problem into it, we get F = 395062 N.
It will be more visual to translate this figure into an equivalent mass using the formula for body weight. Then we get: F = 395062/9.81 ≈ 40 tons! In other words, a bird perceives a collision with an airplane as if 40 tons of cargo had fallen on it. Any problems on moving bodies in classical mechanics require knowledge of the concept of momentum. This article discusses this concept, gives an answer to the question of where the momentum vector of the body is directed, and also provides an example of solving the problem. Number of movementTo find out where the momentum vector of the body is directed, it is necessary, first of all, to understand its physical meaning. The term was first explained by Isaac Newton, but it is important to note that the Italian scientist Galileo Galilei already used a similar concept in his works. To characterize a moving object, he introduced a quantity called aspiration, onslaught, or impulse proper (impeto in Italian). The merit of Isaac Newton lies in the fact that he was able to connect this characteristic with the forces acting on the body. So, initially and more correctly, what most people understand by the momentum of the body, call the momentum. Indeed, the mathematical formula for the quantity under consideration is written as: Here m is the mass of the body, v¯ is its speed. As can be seen from the formula, we are not talking about any impulse, there is only the speed of the body and its mass, that is, the amount of motion. It is important to note that this formula does not follow from mathematical proofs or expressions. Its occurrence in physics has an exclusively intuitive, everyday character. So, any person is well aware that if a fly and a truck move at the same speed, then the truck is much harder to stop, since it has much more movement than an insect.
The origin of the concept of the momentum vector of the body is discussed below. The impulse of force is the cause of the change in momentumNewton was able to connect the intuitively introduced characteristic with the second law bearing his last name. The impulse of force is a known physical quantity, which is equal to the product of the applied external force to some body by the time of its action. Using the well-known Newton's law and assuming that the force does not depend on time, we can come to the expression:
Here Δt is the time of action of the force F, a is the linear acceleration imparted by the force F to a body of mass m. As you know, multiplying the acceleration of a body by the period of time that it acts, gives an increase in speed. This fact allows us to rewrite the formula above in a slightly different form:
The right side of the equation represents the change in momentum (see the expression in the previous paragraph). Then it will turn out:
Thus, using Newton's law and the concept of the momentum of a force, one can come to an important conclusion: the impact of an external force on an object for some time leads to a change in its momentum.
Now it becomes clear why the amount of motion is usually called the impulse, because its change coincides with the momentum of the force (the word "force", as a rule, is omitted). The vector quantity p¯
Some quantities (F¯, v¯, a¯, p¯) have a bar above them. This means that we are talking about a vector characteristic. That is, the amount of motion, as well as speed, force and acceleration, in addition to the absolute value (modulus), is also described by the direction. Since each vector can be decomposed into separate components, then, using the Cartesian rectangular coordinate system, we can write the following equalities:
Here, the 1st expression is the vector form of the momentum representation, the 2nd set of formulas allows you to calculate each of the momentum components p¯, knowing the corresponding velocity components (indices x, y, z indicate the projection of the vector onto the corresponding coordinate axis). Finally, the 3rd formula allows you to calculate the length of the momentum vector (the absolute value of the quantity) through its components. Where is the body's momentum vector directed?Having considered the concept of momentum p¯ and its basic properties, one can easily answer the question posed. The momentum vector of the body is directed in the same way as the linear velocity vector. Indeed, it is known from mathematics that the multiplication of the vector a¯ by the number k leads to the formation of a new vector b¯ with the following properties:
In this case, the role of the vector a¯ is played by the velocity v¯, the momentum p¯ is the new vector b¯, and the number k is the mass of the body m. Since the latter is always positive (m>0), then, answering the question: what is the direction of the momentum vector of the body p¯, it should be said that it is co-directed to the velocity v¯. Momentum change vectorIt is interesting to consider another similar question: where is the vector of change in the momentum of the body directed, that is, Δp¯. To answer it, you should use the formula obtained above:
Based on the reasoning in the previous paragraph, we can say that the direction of change in momentum Δp¯ coincides with the direction of the force vector F¯ (Δt > 0) or with the direction of the vector of change in velocity Δv¯ (m > 0). It is important not to confuse here that we are talking about a change in values. In general, the vectors p¯ and Δp¯ do not coincide, since they are not related to each other in any way. For example, if the force F¯ will act against the speed v¯ of the object, then p¯ and Δp¯ will be directed in opposite directions. Where is it important to take into account the vector nature of the momentum?
The questions discussed above: where the momentum vector of the body and the vector of its change are directed, are not due to simple curiosity. The point is that the momentum conservation law p¯ holds for each of its components. That is, in its most complete form, it is written as follows:
Each component of the vector p¯ retains its value in the system of interacting objects that are not affected by external forces (Δp¯ = 0). How to use this law and vector representations of p¯ to solve problems on the interaction (collision) of bodies? Problem with two ballsThe figure below shows two balls of different masses that fly at different angles to a horizontal line. Let the masses of the balls be m 1 = 1 kg, m 2 = 0.5 kg, their speeds v 1 = 2 m/s, v 2 = 3 m/s. It is necessary to determine the direction of the momentum after the impact of the balls, assuming that the latter is absolutely inelastic.
Starting to solve the problem, one should write down the law of invariance of momentum in vector form, that is:
Since each momentum component must be conserved, this expression must be rewritten, also taking into account that after the collision, the two balls will begin to move as a single object (absolutely inelastic impact):
The minus sign for the projection of the momentum of the first body onto the y-axis appeared due to its direction against the chosen vector of the y-axis (see Fig.). Now we need to express the unknown components of the speed u, and then substitute the known values into the expressions (the corresponding projections of the speeds are determined by multiplying the modules of the vectors v 1 ¯ and v 2 ¯ by trigonometric functions):
These are two components of the speed of the body after the impact and "sticking" of the balls. Since the direction of the velocity coincides with the momentum vector p¯, then the question of the problem can be answered if we define u¯. Its angle relative to the horizontal axis will be equal to the arc tangent of the ratio of the components u y and u x:
The minus sign indicates that the momentum (velocity) after the impact will be directed downward from the x-axis. |






















| Read: |
|---|

New
- Phraseologisms with the word "beat" and their meaning (with examples) Beat the alarm meaning
- Distance from point to plane
- Wavelength and speed of its propagation
- Why do Japanese people need hieroglyphs and why they can't refuse them Japanese language
- Collection of laboratory work in informatics Laboratory work in informatics for the direction of auto business
- An algorithm for finding the mass of a solute and the mass of water needed to prepare a solution How to find the mass of a solvent formula
- Displacement vector projections
- Linear dependence and independence of geometric vectors Criterion for linear dependence of a system of arithmetic vectors
- Least square method
- Surface liquid layer




