Sections of the site
Editor's Choice:
- Self-knowledge Three lectures will be given in this section
- Where is MGU named after Moscow State Law University named after
- Analysis of the story “NOSE”: theme, idea, characteristics of the main characters, impression of the book (Gogol N
- Examples of light diffraction in life
- Vectors for dummies. Actions with vectors. Vector coordinates. The simplest problems with vectors. How to find the coordinates of a vector The simplest problems of analytical geometry. Actions with vectors in coordinates
- Murphy - The Legendary English Grammar
- About the company VKS-International House
- Read the summary of Matrenin Dvor
- What are antonyms in Russian
- Stolypin's agrarian reform: causes, progress, consequences of the Stolypin Reform
Advertising
|
Finally, I got my hands on this extensive and long-awaited topic. analytical geometry. First, a little about this section of higher mathematics... Surely you now remember a school geometry course with numerous theorems, their proofs, drawings, etc. What to hide, an unloved and often obscure subject for a significant proportion of students. Analytical geometry, oddly enough, may seem more interesting and accessible. What does the adjective “analytical” mean? Two cliched mathematical phrases immediately come to mind: “graphical solution method” and “analytical solution method.” Graphical method, of course, is associated with the construction of graphs and drawings. Analytical or method involves solving problems mainly through algebraic operations. In this regard, the algorithm for solving almost all problems of analytical geometry is simple and transparent; often it is enough to carefully apply the necessary formulas - and the answer is ready! No, of course, we won’t be able to do this without drawings at all, and besides, for a better understanding of the material, I will try to cite them beyond necessity. The newly opened course of lessons on geometry does not pretend to be theoretically complete; it is focused on solving practical problems. I will include in my lectures only what, from my point of view, is important in practical terms. If you need more complete help on any subsection, I recommend the following quite accessible literature: 1) A thing that, no joke, several generations are familiar with: School textbook on geometry, authors - L.S. Atanasyan and Company. This school locker room hanger has already gone through 20 (!) reprints, which, of course, is not the limit. 2) Geometry in 2 volumes. Authors L.S. Atanasyan, Bazylev V.T.. This is literature for high school, you will need first volume. Rarely encountered tasks may fall out of my sight, and the tutorial will be of invaluable help. Both books can be downloaded for free online. In addition, you can use my archive with ready-made solutions, which can be found on the page Download examples in higher mathematics. Among the tools, I again propose my own development - software package in analytical geometry, which will greatly simplify life and save a lot of time. It is assumed that the reader is familiar with basic geometric concepts and figures: point, line, plane, triangle, parallelogram, parallelepiped, cube, etc. It is advisable to remember some theorems, at least the Pythagorean theorem, hello to repeaters) And now we will consider sequentially: the concept of a vector, actions with vectors, vector coordinates. I recommend reading further the most important article Dot product of vectors, and also Vector and mixed product of vectors. A local task - Division of a segment in this respect - will also not be superfluous. Based on the above information, you can master equation of a line in a plane With simplest examples of solutions, which will allow learn to solve geometry problems. The following articles are also useful: Equation of a plane in space, Equations of a line in space, Basic problems on a straight line and a plane, other sections of analytical geometry. Naturally, standard tasks will be considered along the way. Vector concept. Free vectorFirst, let's repeat the school definition of a vector. Vector called directed a segment for which its beginning and end are indicated: In this case, the beginning of the segment is the point, the end of the segment is the point. The vector itself is denoted by . Direction is essential, if you move the arrow to the other end of the segment, you get a vector, and this is already completely different vector. It is convenient to identify the concept of a vector with the movement of a physical body: you must agree, entering the doors of an institute or leaving the doors of an institute are completely different things. It is convenient to consider individual points of a plane or space as the so-called zero vector. For such a vector, the end and beginning coincide. !!! Note: Here and further, you can assume that the vectors lie in the same plane or you can assume that they are located in space - the essence of the material presented is valid for both the plane and space. Designations: Many immediately noticed the stick without an arrow in the designation and said, there’s also an arrow at the top! True, you can write it with an arrow: , but it is also possible the entry that I will use in the future. Why? Apparently, this habit developed for practical reasons; my shooters at school and university turned out to be too different-sized and shaggy. In educational literature, sometimes they don’t bother with cuneiform writing at all, but highlight the letters in bold: , thereby implying that this is a vector. That was stylistics, and now about ways to write vectors: 1) Vectors can be written in two capital Latin letters: 2) Vectors are also written in small Latin letters: Length or module a non-zero vector is called the length of the segment. The length of the zero vector is zero. Logical. The length of the vector is indicated by the modulus sign: , We will learn how to find the length of a vector (or we will repeat it, depending on who) a little later. This was basic information about vectors, familiar to all schoolchildren. In analytical geometry, the so-called free vector. To put it simply - the vector can be plotted from any point: We are accustomed to calling such vectors equal (the definition of equal vectors will be given below), but from a purely mathematical point of view, they are the SAME VECTOR or free vector. Why free? Because in the course of solving problems, you can “attach” this or that “school” vector to ANY point of the plane or space you need. This is a very cool feature! Imagine a directed segment of arbitrary length and direction - it can be “cloned” an infinite number of times and at any point in space, in fact, it exists EVERYWHERE. There is such a student saying: Every lecturer gives a damn about the vector. After all, it’s not just a witty rhyme, everything is almost correct - a directed segment can be added there too. But don’t rush to rejoice, it’s the students themselves who often suffer =) So, free vector- This a bunch of identical directed segments. The school definition of a vector, given at the beginning of the paragraph: “A directed segment is called a vector...” implies specific a directed segment taken from a given set, which is tied to a specific point in the plane or space. It should be noted that from the point of view of physics, the concept of a free vector is generally incorrect, and the point of application matters. Indeed, a direct blow of the same force on the nose or forehead, enough to develop my stupid example, entails different consequences. However, unfree vectors are also found in the course of vyshmat (don’t go there :)). Actions with vectors. Collinearity of vectorsA school geometry course covers a number of actions and rules with vectors: addition according to the triangle rule, addition according to the parallelogram rule, vector difference rule, multiplication of a vector by a number, scalar product of vectors, etc. As a starting point, let us repeat two rules that are especially relevant for solving problems of analytical geometry. The rule for adding vectors using the triangle ruleConsider two arbitrary non-zero vectors and : You need to find the sum of these vectors. Due to the fact that all vectors are considered free, we will set aside the vector from end vector: The sum of vectors is the vector. For a better understanding of the rule, it is advisable to put a physical meaning into it: let some body travel along the vector , and then along the vector . Then the sum of vectors is the vector of the resulting path with the beginning at the departure point and the end at the arrival point. A similar rule is formulated for the sum of any number of vectors. As they say, the body can go its way very lean along a zigzag, or maybe on autopilot - along the resulting vector of the sum. By the way, if the vector is postponed from started vector, then we get the equivalent parallelogram rule addition of vectors. First, about collinearity of vectors. The two vectors are called collinear, if they lie on the same line or on parallel lines. Roughly speaking, we are talking about parallel vectors. But in relation to them, the adjective “collinear” is always used. Imagine two collinear vectors. If the arrows of these vectors are directed in the same direction, then such vectors are called co-directed. If the arrows point in different directions, then the vectors will be opposite directions. Designations: collinearity of vectors is written with the usual parallelism symbol: , while detailing is possible: (vectors are co-directed) or (vectors are oppositely directed). The work a non-zero vector on a number is a vector whose length is equal to , and the vectors and are co-directed at and oppositely directed at . The rule for multiplying a vector by a number is easier to understand with the help of a picture: Let's look at it in more detail: 1) Direction. If the multiplier is negative, then the vector changes direction to the opposite. 2) Length. If the multiplier is contained within or , then the length of the vector decreases. So, the length of the vector is half the length of the vector. If the modulus of the multiplier is greater than one, then the length of the vector increases in time. 3) Please note that all vectors are collinear, while one vector is expressed through another, for example, . The reverse is also true: if one vector can be expressed through another, then such vectors are necessarily collinear. Thus: if we multiply a vector by a number, we get collinear(relative to the original) vector. 4) The vectors are co-directed. Vectors and are also co-directed. Any vector of the first group is oppositely directed with respect to any vector of the second group. Which vectors are equal?Two vectors are equal if they are in the same direction and have the same length. Note that codirectionality implies collinearity of vectors. The definition would be inaccurate (redundant) if we said: “Two vectors are equal if they are collinear, codirectional, and have the same length.” From the point of view of the concept of a free vector, equal vectors are the same vector, as discussed in the previous paragraph. Vector coordinates on the plane and in spaceThe first point is to consider vectors on the plane. Let us depict a Cartesian rectangular coordinate system and plot it from the origin of coordinates single vectors and :
Vectors and orthogonal. Orthogonal = Perpendicular. I recommend that you slowly get used to the terms: instead of parallelism and perpendicularity, we use the words respectively collinearity And orthogonality. Designation: The orthogonality of vectors is written with the usual perpendicularity symbol, for example: . The vectors under consideration are called coordinate vectors or orts. These vectors form basis on surface. What a basis is, I think, is intuitively clear to many; more detailed information can be found in the article Linear (non) dependence of vectors. Basis of vectors In simple words, the basis and origin of coordinates define the entire system - this is a kind of foundation on which a full and rich geometric life boils. Sometimes the constructed basis is called orthonormal basis of the plane: “ortho” - because the coordinate vectors are orthogonal, the adjective “normalized” means unit, i.e. the lengths of the basis vectors are equal to one. Designation: the basis is usually written in parentheses, inside which in strict sequence basis vectors are listed, for example: . Coordinate vectors it is forbidden rearrange. Any plane vector the only way expressed as: Dinner served:
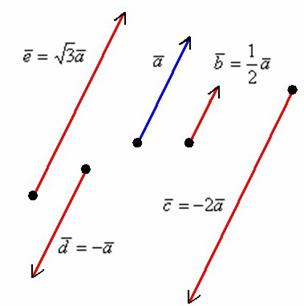
Let's start with the first letter of the alphabet: . The drawing clearly shows that when decomposing a vector into a basis, the ones just discussed are used: Now mentally plot the vector from any other point on the plane. It is quite obvious that his decay will “follow him relentlessly.” Here it is, the freedom of the vector - the vector “carries everything with itself.” This property, of course, is true for any vector. It's funny that the basis (free) vectors themselves do not have to be plotted from the origin; one can be drawn, for example, at the bottom left, and the other at the top right, and nothing will change! True, you don’t need to do this, since the teacher will also show originality and draw you a “credit” in an unexpected place. Vectors illustrate exactly the rule for multiplying a vector by a number, the vector is codirectional with the base vector, the vector is directed opposite to the base vector. For these vectors, one of the coordinates is equal to zero; you can meticulously write it like this: And finally: , . By the way, what is vector subtraction, and why didn’t I talk about the subtraction rule? Somewhere in linear algebra, I don’t remember where, I noted that subtraction is a special case of addition. Thus, the expansions of the vectors “de” and “e” are easily written as a sum: , The considered decomposition of the form Or with an equal sign: The basis vectors themselves are written as follows: and That is, the coordinates of the vector are indicated in parentheses. In practical problems, all three notation options are used. I doubted whether to speak, but I’ll say it anyway: vector coordinates cannot be rearranged. Strictly in first place we write down the coordinate that corresponds to the unit vector, strictly in second place we write down the coordinate that corresponds to the unit vector. Indeed, and are two different vectors. We figured out the coordinates on the plane. Now let's look at vectors in three-dimensional space, almost everything is the same here! It will just add one more coordinate. It’s hard to make three-dimensional drawings, so I’ll limit myself to one vector, which for simplicity I’ll set aside from the origin: Any 3D space vector the only way expand over an orthonormal basis: Example from the picture: All vectors of three-dimensional space, naturally, are also free; try to mentally set aside the vector from any other point, and you will understand that its decomposition “will remain with it.” Similar to the flat case, in addition to writing If one (or two) coordinate vectors are missing in the expansion, then zeros are put in their place. Examples: The basis vectors are written as follows: This, perhaps, is all the minimum theoretical knowledge necessary to solve problems of analytical geometry. There may be a lot of terms and definitions, so I recommend that teapots re-read and comprehend this information again. And it will be useful for any reader to refer to the basic lesson from time to time to better assimilate the material. Collinearity, orthogonality, orthonormal basis, vector decomposition - these and other concepts will be often used in the future. I note that the materials on the site are not enough to pass the theoretical test or colloquium on geometry, since I carefully encrypt all theorems (and without proofs) - to the detriment of the scientific style of presentation, but a plus to your understanding of the subject. To receive detailed theoretical information, please bow to Professor Atanasyan. And we move on to the practical part: The simplest problems of analytical geometry.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||









Week of event |
Module score in points |
||||
module control |
|||||
Maximum |
Minimum |
||||
Semester 1 |
|||||
DZ No. 1, part 1 |
|||||
DZ No. 1, part 2 |
|||||
Control by module No. 1 |
|||||
Award points |
|||||
Control by module No. 2 |
|||||
Award points |
|||||
Control measures and timing of their implementation Module 1
1. DZ No. 1 part 1 “Vector algebra” Issue deadline 2 weeks, due date - 7 weeks
2. DZ No. 1 part 2 “Straight lines and planes”
Issuance period is 1 week, due date is 9 weeks
3. Test on module No. 1 (RC No. 1) “Vector algebra, lines and planes.” Duration: 10 weeks
1. DZ No. 2 “Curves and surfaces 2nd order" Issue time 6 weeks, due date - 13 weeks
5. Test "Curves and surfaces" 2nd order." Duration: 14 weeks
6. Control on module No. 2 (RC No. 2) “Matrixes and systems of linear algebraic equations”
Duration: 16 weeks
Typical tasks used in the formation of current control options
1. Homework No. 1. "Vector algebra and analytical geometry"
Given: points A (0;3;2) , B (1;4;2) , D (0;1;2) , |
A(1;2;0); numbers a 30, |
b 1 ; corner |
|||||||
1. Find the length of the vector | |
n | , If |
p aq , |
n bp q |
and p, q are unit ones |
|||||
vectors whose angles are equal.
2. Find the coordinates of the point M dividing the vector AB in the ratio a:1.
3. Check if it is possible on vectors AB and AD construct a parallelogram. If yes, then find the lengths of the sides of the parallelogram.
4. Find the angles between the diagonals of parallelogram ABCD.
5. Find the area of parallelogram ABCD.
6. Make sure that on the vectors AB, AD, AA 1 you can build a parallelepiped. Find the volume of this parallelepiped and the length of its height.
7. Find vector coordinates AH, directed along the height of the parallelepiped ABCDA 1 B 1 C 1 D 1, drawn from point A to the base plane A 1 B 1 C 1 D 1,
coordinates of point H and coordinates of a unit vector coinciding in direction with vector AH.
8. Find the vector decomposition AH by vectors AB, AD, AA 1.
9. Find the projection of the vector AH to vector AA 1.
10. Write the equations of the planes: a) P, passing through points A, B, D;
b) P1 passing through point A and line A1 B1;
c) P2 passing through point A1 parallel to plane P; d) P3 containing straight lines AD and AA1;
e) P4, passing through points A and C1, perpendicular to plane P.
11. Find the distance between the lines on which the edges AB and CC lie 1 ; write canonical and parametric equations of the common perpendicular to them.
12. Find point A 2 symmetrical to point A1 relative to the plane of the base
13. Find the angle between the line on which diagonal A lies 1 C, and the base plane ABCD.
14. Find an acute angle between planes ABC 1 D (P plane) and ABB1 A1 (P1 plane).
2. Homework #2. "Curves and surfaces of the second order"
In problems 1–2, bring the given equation of a second-order line to canonical form and construct a curve in the OXY coordinate system.
IN Problem 3, using the given data, find the equation of the curve in the OXY coordinate system. For tasks 1–3 indicate:
1) canonical form of the line equation;
2) parallel translation transformation leading to canonical form;
3) in the case of an ellipse: semi-axes, eccentricity, center, vertices, foci, distances from point C to foci; in the case of a hyperbola: semi-axes, eccentricity, center, vertices, foci, distances from point C to foci, equations of asymptotes; in the case of a parabola: parameter, vertex, focus, directrix equation, distances from point C to focus and directrix;
4) for point C, check the property that characterizes this type of curve as a locus of points.
IN Problem 4 indicate the parallel translation transformation that brings the given surface equation to canonical form, the canonical form of the surface equation and the type of surface. Construct a surface in the canonical coordinate system OXYZ.

5x 2 y 2 20x 2y 4 , C (0;1 |
2) 5x 2 4y 2 20x 8y 64 , C (12;14) . |
|||||||
5) ; |
||||||||
The parabola is symmetrical with respect to the straight line y 1 0 and has a focus |
; 1 , |
|||||||
intersects the OX axis at point C |
; 0 , and its branches lie in the half-plane |
x 0 . |
||||||
4y 2 z 2 8y 4z 1 0 . |
||||||||
Test on module No. 1 “Vector algebra. Analytic geometry"
1. Right and left triples of vectors. Definition of the vector product of vectors. Formulate the properties of the vector product of vectors. Derive a formula for calculating the vector product of two vectors specified by their coordinates in an orthonormal basis.
vectors |
a m n, |
|||||||||||||||||||||||||||||||
mn, |
||||||||||||||||||||||||||||||||
1, m, n |
||||||||||||||||||||||||||||||||
Maybe, |
vector decomposition |
c 3 i |
12 j 6k |
vectors |
||||||||||||||||||||||||||||
3 j 2 k and b 2 i 3 j 4 k. |
||||||||||||||||||||||||||||||||
Write down the equation of the plane, |
passing through points M 1 5, 1, 4, |
M 2 2, 3.1 and |
||||||||||||||||||||||||||||||
perpendicular to the plane |
6x 5y 4z 1 0. Write canonical equations |
|||||||||||||||||||||||||||||||
a straight line passing through the point M 0 0, 2,1 and orthogonal to the found plane.
Test "Curves and surfaces of the second order"
1. Definition of an ellipse as a geometric locus of points. Derivation of the canonical equation of an ellipse in a rectangular Cartesian coordinate system. Basic parameters of the curve.
2. Surface equation x 2 4y 2 z 2 8x 4y 6z 17 0 lead to canonical
mind. Make a drawing in the canonical coordinate system. Indicate the name of this surface.
3. Write an equation for an equiaxed hyperbola if its center O 1 1, 1 and one of its foci F 1 3, 1 are known. Make a drawing.
Test on module No. 2 “Curves and surfaces of the second order. Matrices and systems of linear algebraic equations"
1. Homogeneous systems of linear algebraic equations (SLAEs). Forms of recording homogeneous SLAE. Proof of a criterion for the existence of nonzero solutions of a homogeneous SLAE.
2. Solve the matrix equation AX B, |
||||||||
Do a check.
3. a) Solve the SLAE. b) Find the normal fundamental system of solutions of the corresponding homogeneous system, a particular solution of the inhomogeneous system; write through them the general solution of this inhomogeneous system:
x 1 2 x 2 3 x 3 4 x 4 4 x 2 x 3 x 4 3
x 1 3 x 2 3 x 4 1
7 x 2 3 x 3 x 4 3
Questions to prepare for module tests, tests, tests and exams
1. Geometric vectors. Free vectors. Definition of collinear and coplanar vectors. Linear operations on vectors and their properties.
2. Determination of linear dependence and linear independence of vectors. Proofs of linear dependence conditions 2 and 3 vectors.
3. Definition of basis in vector spaces V 1, V 2, V 3. Proof of the theorem on the existence and uniqueness of the expansion of a vector with respect to a basis. Linear operations on vectors specified by their coordinates in the basis.
4. Definition of the scalar product of vectors, its connection with the orthogonal projection of the vector onto the axis. Properties of the scalar product, their proof. Derivation of the formula for calculating the scalar product of vectors in an orthonormal basis.
5. Definition of an orthonormal basis. Relationship between the coordinates of a vector in an orthonormal basis and its orthogonal projections onto the vectors of this basis. Deriving formulas for calculating the length of a vector, its direction cosines, and the angle between two vectors in an orthonormal basis.
6. Right and left triples of vectors. Definition of the vector product of vectors, its mechanical and geometric meaning. Properties of the vector product (without document). Derivation of the formula for calculating the vector product in an orthonormal basis.
7. Definition of a mixed product of vectors. The volume of a parallelepiped and the volume of a pyramid, built on non-coplanar vectors. Condition for coplanarity of three vectors. Properties of a mixed product. Derivation of a formula for calculating a mixed product in an orthonormal basis.
8. Definition of a rectangular Cartesian coordinate system. Solving the simplest problems of analytical geometry.
9. Various types of equation of a straight line on a plane: vector, parametric, canonical. The direction vector is straight.
10. Deriving the equation of a line passing through two given points.
11. Proof of the theorem that in a rectangular Cartesian coordinate system on a plane, an equation of the first degree defines a straight line. Determination of the normal vector of a line.
12. An equation with an angular coefficient, an equation of a straight line “in segments”. Geometric meaning of the parameters included in the equations. The angle between two straight lines. Conditions for parallelism and perpendicularity of two lines, given by their general or canonical equations.
13. Derivation of the formula for the distance from a point to a line on a plane.
14. Proof of the theorem that in a rectangular Cartesian coordinate system in space, an equation of the first degree defines a plane. General equation of the plane. Determination of the normal vector of a plane. Deriving the equation of a plane passing through three given points. Equation of the plane “in segments”.
15. Angle between planes. Conditions for parallelism and perpendicularity of two planes.
16. Derivation of the formula for the distance from a point to a plane.
17. General equations of a straight line in space. Derivation of vector, canonical and parametric equations of a straight line in space.
18. The angle between two straight lines in space, the conditions of parallelism and perpendicularity of two straight lines. Conditions for two straight lines to belong to the same plane.
19. The angle between a straight line and a plane, the conditions of parallelism and perpendicularity of a straight line and a plane. Condition for a straight line to belong to a given plane.
20. The problem of finding the distance between crossing or parallel lines.
21. Definition of an ellipse as a geometric locus of points. Derivation of the canonical equation of the ellipse.
22. Definition of a hyperbola as a locus of points. Derivation of the canonical hyperbola equation.
23. Definition of a parabola as a locus of points. Derivation of the canonical parabola equation.
24. Definition of a cylindrical surface. Canonical equations of cylindrical surfaces 2nd order.
25. The concept of a surface of revolution. Canonical equations of surfaces formed by rotation of an ellipse, hyperbola and parabola.
26. Canonical equations of an ellipsoid and a cone. Study of the shape of these surfaces by the method of sections.
27. Canonical equations of hyperboloids. Study of the shape of hyperboloids by the method of sections.
28. Canonical equations of paraboloids. Study of the shape of paraboloids by the method of sections.
29. The concept of a matrix. Types of matrices. Matrix equality. Linear operations on matrices and their properties. Transposing matrices.
30. Matrix multiplication. Properties of the matrix multiplication operation.
31. Definition of an inverse matrix. Proof of the uniqueness of the inverse matrix. Proof of the theorem on the inverse matrix of the product of two invertible matrices.
32. Criterion for the existence of an inverse matrix. The concept of an adjoint matrix, its connection with the inverse matrix.
33. Derivation of Cramer formulas for solving a system of linear equations with a non-singular square matrix.
34. Linear dependence and linear independence of rows (columns) of a matrix. Proof of the criterion for linear dependence of rows (columns).
35. Definition of a matrix minor. Basic minor. The theorem on the basis minor (without doqua). Proof of its corollary for square matrices.
36. The method of bordering minors for finding the rank of a matrix.
37. Elementary transformations of matrix rows (columns). Finding the inverse matrix using the method of elementary transformations.
38. Theorem on the invariance of the rank of a matrix under elementary transformations. Finding the rank of a matrix using the method of elementary transformations.
39. Systems of linear algebraic equations (SLAEs). Various forms of recording SLAE. Joint and incompatible SLAE. Proof of the Kronecker-Kapell criterion for the compatibility of SLAEs.
40. Homogeneous systems of linear algebraic equations (SLAEs). Properties of their solutions.
41. Determination of the fundamental system of solutions (FSS) of a homogeneous system of linear algebraic equations (SLAE). Theorem on the structure of the general solution of a homogeneous SLAE. Construction of the FSR.
42. Inhomogeneous systems of linear algebraic equations (SLAEs). Proof of the theorem on the structure of the general solution of an inhomogeneous SLAE.
Control event |
Number of tasks |
Points for the task |
DZ No. 1, part 1 |
||
Points earned |
||
Control event |
Number of tasks |
Points for the task |
DZ No. 1, part 2 |
||
Points earned |
||
Control event |
Number of tasks |
Points for the task |
||||||||
Control by module No. 1 |
1 theory and 3 problems |
theory – 0; 3; 6 |
||||||||
tasks - 0; 1; 2 |
||||||||||
Points earned |
||||||||||
Control event |
Number of tasks |
Points for the task |
||||||||
Points earned |
||||||||||
Control event |
Number of tasks |
Points for the task |
||||||||
1 theory and 3 problems |
theory – 0; 3; 6 |
|||||||||
tasks - 0; 1; 2 |
||||||||||
Points earned |
||||||||||
01 theory and 3 problems |
theory – 0; 3; 6 |
|||||||||
tasks - 0; 1; 2 |
||||||||||
Points earned |
||||||||||
Rules for assigning points in the magazine
1. Points for remote control. Points for work assignments are issued the following week after the due date, according to the corresponding table. The student has the right to submit individual assignments for review earlier than the deadline and correct errors noted by the teacher, while receiving the necessary advice. If by the final deadline for submitting the assignment the student brings the solution to the problem to the correct version, then he is given the maximum score for this task. After the deadline for submitting the assignment, a student who has not achieved the minimum score for the assignment can continue working on the assignment. In this case, in case of successful work, the student is awarded a minimum score for the work assignment.
2. Points for CD. If a student does not achieve the minimum score for the CD on time, then during the semester he can rewrite this work twice. If the result is positive (scores are not less than the established minimum), the student is given the minimum score for the CD.
3. Points for “modular control”. As a “module control”, a written work consisting of theoretical and practical parts is offered. Each part of the module control is assessed separately. A student who receives a grade not lower than the minimum in one of the parts of the test is considered to have passed this part and is exempt from completing it in the future. At the discretion of the teacher, an interview may be conducted on the theoretical part of the assignment. If a student does not achieve the established minimum for each part of the work, then during the semester he has two attempts for each part to correct the situation. With a positive
As a result (a set of points not less than the established minimum), the student is given a minimum score for “module control”.
4. Module grade. If the student has completed all current control activities of the module (scored at least the established minimum score),
then the grade for the module is the sum of points for all control activities of the module (in this case, the student automatically scores at least the minimum threshold). The final scores for the module are recorded in the journal after all control activities have been completed.
5. Total score. Sum of points for two modules.
6. Evaluation. Final certification (exam, differentiated test, test) is carried out based on the results of work in the semester after the student has completed the planned amount of educational work and received a grade for each module that is not lower than the minimum established. The maximum sum of points for all modules, including points for diligence, is 100, the minimum is 60. The sum of points for all modules forms the rating score for the discipline for the semester. A student who has passed all control events receives a final grade in the discipline for the semester in accordance with the scale:
Exam score, |
Assessment on the test |
||
differentiated standings |
|||
satisfactorily |
|||
unsatisfactory |
|||
You can increase your rating, and, therefore, your exam grade, at the final exam (written work on the material of the discipline as a whole, carried out during the examination session), the maximum score is 30, the minimum is -16. These points are summed up with the points received for all modules in the discipline. At the same time, to increase the grade to “good” for the exam, the student must score at least 21 points, to “excellent” ─ at least 26 points. For specialties where credit in the discipline is provided, the rating is not increased. Students who have a rating in the range of 0-59 at the beginning of the examination session gain the required minimum to receive a positive grade in the discipline by retaking control measures that were not previously passed in individual modules. At the same time, students who do not have a good reason may ultimately (by the end of the examination session) receive a grade no higher than “satisfactory.”
Finding the coordinates of a vector is a fairly common condition for many problems in mathematics. The ability to find vector coordinates will help you in other, more complex problems with similar topics. In this article we will look at the formula for finding vector coordinates and several problems.
Finding the coordinates of a vector in a plane
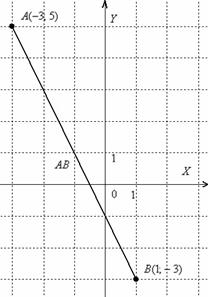
What is a plane? A plane is considered to be a two-dimensional space, a space with two dimensions (the x dimension and the y dimension). For example, paper is flat. The surface of the table is flat. Any non-volumetric figure (square, triangle, trapezoid) is also a plane. Thus, if in the problem statement you need to find the coordinates of a vector that lies on a plane, we immediately remember about x and y. You can find the coordinates of such a vector as follows: Coordinates AB of the vector = (xB – xA; yB – xA). The formula shows that you need to subtract the coordinates of the starting point from the coordinates of the end point.
Example:
- Vector CD has initial (5; 6) and final (7; 8) coordinates.
- Find the coordinates of the vector itself.
- Using the above formula, we get the following expression: CD = (7-5; 8-6) = (2; 2).
- Thus, the coordinates of the CD vector = (2; 2).
- Accordingly, the x coordinate is equal to two, the y coordinate is also two.
Finding the coordinates of a vector in space
What is space? Space is already a three-dimensional dimension, where 3 coordinates are given: x, y, z. If you need to find a vector that lies in space, the formula practically does not change. Only one coordinate is added. To find a vector, you need to subtract the coordinates of the beginning from the end coordinates. AB = (xB – xA; yB – yA; zB – zA)
Example:
- Vector DF has initial (2; 3; 1) and final (1; 5; 2).
- Applying the above formula, we get: Vector coordinates DF = (1-2; 5-3; 2-1) = (-1; 2; 1).
- Remember, the coordinate value can be negative, there is no problem.


How to find vector coordinates online?
If for some reason you don’t want to find the coordinates yourself, you can use an online calculator. To begin, select the vector dimension. The dimension of a vector is responsible for its dimensions. Dimension 3 means that the vector is in space, dimension 2 means that it is on the plane. Next, insert the coordinates of the points into the appropriate fields and the program will determine for you the coordinates of the vector itself. Everything is very simple.


By clicking on the button, the page will automatically scroll down and give you the correct answer along with the solution steps.


It is recommended to study this topic well, because the concept of a vector is found not only in mathematics, but also in physics. Students of the Faculty of Information Technology also study the topic of vectors, but at a more complex level.
The abscissa and ordinate axis are called coordinates vector. Vector coordinates are usually indicated in the form (x, y), and the vector itself as: =(x, y).
Formula for determining vector coordinates for two-dimensional problems.
In the case of a two-dimensional problem, a vector with known coordinates of points A(x 1;y 1) And B(x 2 ; y 2 ) can be calculated:
= (x 2 - x 1; y 2 - y 1).
Formula for determining vector coordinates for spatial problems.
In the case of a spatial problem, a vector with known coordinates of points A (x 1;y 1;z 1 ) and B (x 2 ; y 2 ; z 2 ) can be calculated using the formula:
= (x 2 - x 1 ; y 2 - y 1 ; z 2 - z 1 ).
Coordinates provide a comprehensive description of the vector, since it is possible to construct the vector itself using the coordinates. Knowing the coordinates, it is easy to calculate and vector length. (Property 3 below).
Properties of vector coordinates.
1. Any equal vectors in a single coordinate system have equal coordinates.
2. Coordinates collinear vectors proportional. Provided that none of the vectors is zero.
3. The square of the length of any vector is equal to the sum of the squares of its coordinates.
4.During surgery vector multiplication on real number each of its coordinates is multiplied by this number.
5. When adding vectors, we calculate the sum of the corresponding vector coordinates.
6. Scalar product two vectors is equal to the sum of the products of their corresponding coordinates.
| Read: |
|---|
Popular:

New
- Where is MGU named after Moscow State Law University named after
- Analysis of the story “NOSE”: theme, idea, characteristics of the main characters, impression of the book (Gogol N
- Examples of light diffraction in life
- Vectors for dummies. Actions with vectors. Vector coordinates. The simplest problems with vectors. How to find the coordinates of a vector The simplest problems of analytical geometry. Actions with vectors in coordinates
- Murphy - The Legendary English Grammar
- About the company VKS-International House
- Read the summary of Matrenin Dvor
- What are antonyms in Russian
- Stolypin's agrarian reform: causes, progress, consequences of the Stolypin Reform
- Poem Bakhchisarai Fountain summary




